在機器人操作系統(tǒng)ROS 2和仿真軟件Gazebo 9的環(huán)境下,目標(biāo)跟蹤是人工智能與機器人技術(shù)融合的關(guān)鍵應(yīng)用之一。本文作為系列實踐的第四部分,將重點介紹如何基于前序基礎(chǔ),開發(fā)人工智能驅(qū)動的目標(biāo)跟蹤應(yīng)用軟件。通過結(jié)合ROS 2的靈活框架與Gazebo 9的高保真仿真能力,開發(fā)者可以高效構(gòu)建、測試和部署智能跟蹤系統(tǒng)。
1. 人工智能在目標(biāo)跟蹤中的應(yīng)用概述
目標(biāo)跟蹤的核心在于讓機器人自主識別并跟隨特定目標(biāo)(如人、物體或其他機器人)。人工智能技術(shù),特別是計算機視覺和機器學(xué)習(xí),為此提供了強大支持。在ROS 2中,我們可以利用OpenCV、TensorFlow或PyTorch等庫集成AI模型,實現(xiàn)實時圖像處理和目標(biāo)檢測。Gazebo 9則提供了一個安全的仿真環(huán)境,用于驗證跟蹤算法的性能,無需依賴實體機器人,從而降低開發(fā)風(fēng)險和成本。
2. 開發(fā)環(huán)境搭建與依賴配置
確保已安裝ROS 2(推薦Humble或Foxy版本)和Gazebo 9。在ROS 2工作空間中,創(chuàng)建包以管理目標(biāo)跟蹤應(yīng)用。關(guān)鍵依賴包括:
- rclcpp:用于C++節(jié)點開發(fā),或rclpy用于Python。
- cv_bridge:連接ROS 2圖像消息與OpenCV。
- gazeborospkgs:實現(xiàn)ROS 2與Gazebo的集成。
- AI模型庫:例如,使用預(yù)訓(xùn)練的YOLO或SSD模型進行目標(biāo)檢測,可通過ROS 2包或自定義節(jié)點加載。
通過編輯package.xml和CMakeLists.txt(或setup.py),添加這些依賴,確保系統(tǒng)能編譯和運行AI組件。
3. 目標(biāo)跟蹤應(yīng)用軟件開發(fā)步驟
開發(fā)過程可分為以下階段:
a. 數(shù)據(jù)采集與仿真設(shè)置
在Gazebo 9中搭建仿真場景,例如,添加一個移動目標(biāo)(如小車或行人模型)和一個配備攝像頭的跟蹤機器人。使用Gazebo插件發(fā)布圖像話題,模擬真實傳感器數(shù)據(jù)。通過ROS 2節(jié)點訂閱這些話題,獲取仿真環(huán)境中的視頻流。
b. 集成AI模型進行目標(biāo)檢測
開發(fā)一個ROS 2節(jié)點(例如detection<em>node),使用OpenCV處理圖像,并加載AI模型識別目標(biāo)。將檢測結(jié)果(如邊界框和類別)發(fā)布到ROS話題(如/detected</em>objects)。代碼示例中,可利用ROS 2的發(fā)布-訂閱機制實現(xiàn)高效通信。
c. 跟蹤算法實現(xiàn)與控制邏輯
基于檢測結(jié)果,設(shè)計跟蹤算法(如PID控制或更高級的強化學(xué)習(xí))。創(chuàng)建另一個節(jié)點(如tracking_node),訂閱檢測話題,計算機器人與目標(biāo)的位置偏差,并生成控制命令(如速度指令)。通過ROS 2動作或服務(wù),將命令發(fā)送到Gazebo中的機器人模型,實現(xiàn)實時跟蹤。
d. 性能優(yōu)化與測試
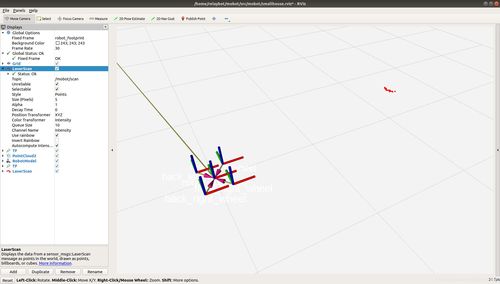
在Gazebo 9中多次運行仿真,調(diào)整AI模型參數(shù)和跟蹤邏輯,以提高準(zhǔn)確性和魯棒性。利用ROS 2的日志和可視化工具(如RViz2)監(jiān)控系統(tǒng)狀態(tài)。可考慮使用GPU加速AI推理,以提升處理速度。
4. 實際應(yīng)用案例與挑戰(zhàn)
例如,開發(fā)一個倉庫機器人跟蹤搬運物品的應(yīng)用。在Gazebo中模擬倉庫環(huán)境,機器人使用攝像頭識別貨物并自主跟隨。實踐中可能遇到挑戰(zhàn):
- 仿真與現(xiàn)實的差距:Gazebo 9的物理引擎可能無法完全復(fù)制真實世界,需通過噪聲注入增強模型泛化能力。
- 實時性要求:ROS 2的延遲可能影響跟蹤效果,優(yōu)化節(jié)點通信和AI模型輕量化是關(guān)鍵。
- 集成復(fù)雜度:結(jié)合多傳感器(如激光雷達(dá))可提高跟蹤精度,但需處理數(shù)據(jù)融合問題。
5. 與展望
通過ROS 2和Gazebo 9,開發(fā)者可以構(gòu)建一個完整的人工智能目標(biāo)跟蹤應(yīng)用軟件,從仿真測試到實際部署。本文介紹了核心開發(fā)流程,強調(diào)了AI模型集成與系統(tǒng)優(yōu)化的要點。隨著ROS 2生態(tài)的完善和AI技術(shù)的進步,目標(biāo)跟蹤將更加智能化和自適應(yīng),推動服務(wù)機器人、自動駕駛等領(lǐng)域的創(chuàng)新。繼續(xù)探索本專欄的前序內(nèi)容,以深入了解基礎(chǔ)設(shè)置和高級技巧,助力您的項目成功。